Research Fellow University of Vermont Medical Center Burlington, Vermont, United States
Introduction: Developing robotics in endovascular neurosurgery underscores the importance of understanding catheter operator movement. A human-operated endovascular catheter differs in parameters including force, position, rotation, and acceleration from a tele- or robot-operated catheter. To ensure robotic catheter operators functioning as safely and efficiently as humans, we must analyze objective measures of catheter operator technique. We thus expanded upon the single published study(1) measuring these parameters by creating a portable system for objective assessment of human endovascular catheter technique. (1)Rafii-Tari H, Payne CJ, Bicknell C, et al. Objective Assessment of Endovascular Navigation Skills with Force Sensing. Ann of Biomed Eng. 2017;45(5):1315-327.
Methods: This proof-of-concept operator motion-tracking system uses a 9-axis inertial measurement unit (IMU, Sparkfun Artemis Openlog) affixed to a reusable glove on the operator’s dominant hand. We developed customized software capturing and analyzing acceleration and angular momentum, along with video of the catheter’s movements from a camera or biplane output. We tested system performance in a life-sized silicone aortic arch phantom with a radial access port. Operators performed two tasks: catheter reforming at the arch, and left common carotid artery selection. Learning curves were fitted for each operator and IMU output was analyzed on a per-task basis.
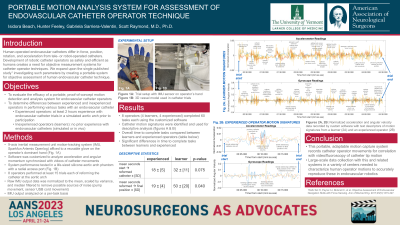
Results: 10 operators of varying experience levels completed 60 tasks each using the software. Operators were classified by experience level and learning curve coefficients. Sources of noise were identified and filtered from the raw data. Catheter motion signatures were identified and used for descriptive analysis.
Conclusion : We developed a motion-capture system recording human catheter operator movements for correlation with catheter tip motion recorded by video or fluoroscopy. Our system is portable and adaptable, making it capable of implementation in a variety of centers. Large scale data collection using this and related systems are necessary to characterize catheter operator motions to accurately reproduce these movements in endovascular robotics.

 photo")