Medical Student Duke University Durham, North Carolina, United States
Introduction: Computer vision (CV), or an algorithm that extracts information from images and video, has the potential to be of assistance in the operating room to track surgeon movements, measure and predict procedure times, and detect cancers. We sought to build a CV algorithm for identifying tools in the neurosurgical operating room as potential solution for surgical tool tracking and management.
Methods: We collected 1663 of images of 27 commonly used neurosurgical tools. Images were labeled using the VGG Image Annotator (4). Images were split into 80% training and 20% testing sets in order to train the UNet Convolutional Neural Network, a common machine learning architecture employed in for object recognition tasks in images.
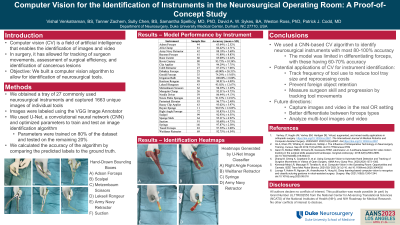
Results: Our computer vision algorithm showed an accuracy of 89.7% when distinguishing between the 11 classes of: Allis Clamp, Clip Applier, Irrigation Bulb, Kerrison Rongeur, Leksell Rongeurs, Needle Driver, Raney Clip Applier, Right Angle Forceps, Sponge Stick, Syringe, and Weitlaner Retractor. The model struggled in accuracy with tools such as Army Navy Retractor, Bone Curette, and Cobb Retractor among other tools, where it failed to correctly identify them in all instances.
Conclusion : We demonstrated the viability of using a machine-learning based computer vision program to accurately identify surgical tools. More training data will be needed to increase accuracy across all surgical tools that would appear in a neurosurgical operating room. Such technology has the potential to be used as a method to track surgical tools and be used to evaluate surgeon performance, help with tool inventory and organization, or prevent incidents such as objects being left inside patients.

 photo")